I am currently a postdoctoral researcher in Nanchang University and work with Prof. Qiegen Liu. Previously, I obtained my B.Eng degree at SGG of Wuhan University, and my PhD degree at LIESMARS of Wuhan University. My PhD supervisor is Prof. Bisheng Yang. My research interest lies in the field of 3D Computer Vision, particularly including point cloud localization, 3D change detection, and photoelectric imaging. If you are interested in my research, feel free to contact me at ericxhzou@ncu.edu.cn!

Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
 School of Advanced Manufacturing, Nanchang UniversityPostdoctoral ResearcherJan. 2025 - Now
School of Advanced Manufacturing, Nanchang UniversityPostdoctoral ResearcherJan. 2025 - Now -
 LIESMARS, Wuhan UniversityPh.D. in Photogrammetry and Remote SensingSep. 2021 - Dec. 2024
LIESMARS, Wuhan UniversityPh.D. in Photogrammetry and Remote SensingSep. 2021 - Dec. 2024 -
LIESMARS, Wuhan UniversityResearch AssistantSep. 2020 - Aug. 2021
-
 CSIG, Tencent (Bei jing)Research and Development EngineerAug. 2019 - Aug. 2020
CSIG, Tencent (Bei jing)Research and Development EngineerAug. 2019 - Aug. 2020 -
LIESMARS, Wuhan UniversityM.S. in Photogrammetry and Remote SensingSep. 2016 - Jul. 2019
-
SGG, Wuhan UniversityB.S. in Surveying and Mapping EngineeringSep. 2012 - Jul. 2016
Honors & Awards
-
Second Prize for Geographic Information Technology Progress of China Association for Geospatial Industry and Sciences (Rank 4/12)2023
-
Second Prize in Surveying and Mapping of the Chinese Society for Geodesy (Rank 4/10)2023
-
Second Prize in Surveying and Mapping of the Chinese Society for Geodesy (Rank 7/10)2022
-
LIESMARS Graduate Science and Technology Innovation Award2018
-
LIESMARS Graduate Science and Technology Innovation Award2016
Selected Publications (view all )
WHU-PCPR: A multi-platform heterogeneous point cloud dataset for place recognition in complex urban scenes
Xianghong Zou, Jianping Li†, Yandi Yang, Weitong Wu, Yuan Wang, Qiegen Liu†, Zhen Dong
ISPRS Journal of Photogrammetry and Remote Sensing (IF: 12.2) 2026
Point Cloud-based Place Recognition (PCPR) demonstrates considerable potential in applications such as autonomous driving, robot localization and navigation, and map update. In practical applications, point clouds used for place recognition are often acquired from different platforms and LiDARs across varying scene. However, existing PCPR datasets lack diversity in scenes, platforms, and sensors, which limits the effective development of related research. To address this gap, we establish WHU-PCPR, a cross-platform heterogeneous point cloud dataset designed for place recognition. The dataset differentiates itself from existing datasets through its distinctive characteristics: 1) cross-platform heterogeneous point clouds: collected from survey-grade vehicle-mounted Mobile Laser Scanning (MLS) systems and low-cost Portable helmet-mounted Laser Scanning (PLS) systems, each equipped with distinct mechanical and solid-state LiDAR sensors. 2) Complex localization scenes: encompassing real-time and long-term changes in both urban and campus road scenes. 3) Large-scale spatial coverage: featuring 82.3 km of trajectory over a 60-month period and an unrepeated route of approximately 30 km. Based on WHU-PCPR, we conduct extensive evaluation and in-depth analysis of several representative PCPR methods, and provide a concise discussion of key challenges and future research directions.
LifelongPR: Lifelong knowledge fusion for point cloud place recognition based on replay and prompt learning
Xianghong Zou, Jianping Li†, Zhe Chen, Zhen Cao, Zhen Dong, Qiegen Liu†, Bisheng Yang
IEEE Transactions on Intelligent Transportation Systems (IF: 8.4) 2026
Point cloud place recognition (PCPR) is a fundamental task in robotics and computer vision in the fields of autonomous driving, intelligent transportation, and augmented reality. To cope with the dynamic changes in scenarios and sensor types, PCPR models need to incrementally acquire, update, and accumulate knowledge for continuous evolution—an ability known as continual learning (CL). However, due to the dynamic distributions of incrementally acquired point cloud data, PCPR models often forget previous knowledge when acquiring new knowledge, i.e. catastrophic forgetting. To address this issue, this study proposes a novel CL method tailored for PCPR, which effectively extracts and fuses knowledge learned by the model across sequential point cloud data. First, a replay sample selection method is proposed, dynamically allocating a replay sample size to each training set based on information quantity and selecting replay samples based on spatial distribution. Second, a new CL framework composed of a prompt module and the two-stage training strategy is proposed, and the domain-specific knowledge captured from each training set by the prompt module is used for guiding the backbone network to extract features adapted to individual samples. Comprehensive experiments on large-scale public and self-collected datasets are conducted to validate the effectiveness of the proposed method. Compared with state-of-the-art (SOTA) methods, our method achieves 6.50% improvement in 𝑚𝐼𝑅@1, 7.96% improvement in 𝑚𝑅@1, and an 8.95% reduction in 𝐹.
Reliable-loc: Robust sequential LiDAR global localization in large-scale street scenes based on verifiable cues
Xianghong Zou, Jianping Li†, Weitong Wu, Fuxun Liang, Bisheng Yang†, Zhen Dong
ISPRS Journal of Photogrammetry and Remote Sensing (IF: 10.6) 2025
We propose a LiDAR-based reliable global localization method, Reliable-loc, which achieves better robustness in complex large-scale outdoor scenes with insufficient features and incomplete coverage of the prior map. The experimental results indicate that Reliable-loc exhibits high robustness, accuracy, and efficiency in large-scale, complex street scenes, with a position accuracy of ±2.91 m, yaw accuracy of ±3.74 degrees, and achieves real-time performance.
PatchAugNet: Patch feature augmentation-based heterogeneous point cloud place recognition in large-scale street scenes
Xianghong Zou, Jianping Li†, Yuan Wang, Fuxun Liang, Weitong Wu, Haiping Wang, Bisheng Yang†, Zhen Dong
ISPRS Journal of Photogrammetry and Remote Sensing (IF: 12.7) 2023
We propose PatchAugNet, which utilizes patch feature augmentation and adaptive pyramid feature aggregation to achieve better performance and generalizability for Heterogeneous Point Cloud-based Place Recognition (PCPR) tasks. The comprehensive experimental results indicate that PatchAugNet achieves SOTA performance with 83.43% recall@top1% and 60.34% recall@top1 on unseen large-scale street scenes, outperforming existing SOTA PCPR methods by +9.57 recall@top1% and +15.50 recall@top1, while exhibiting better generalizability.
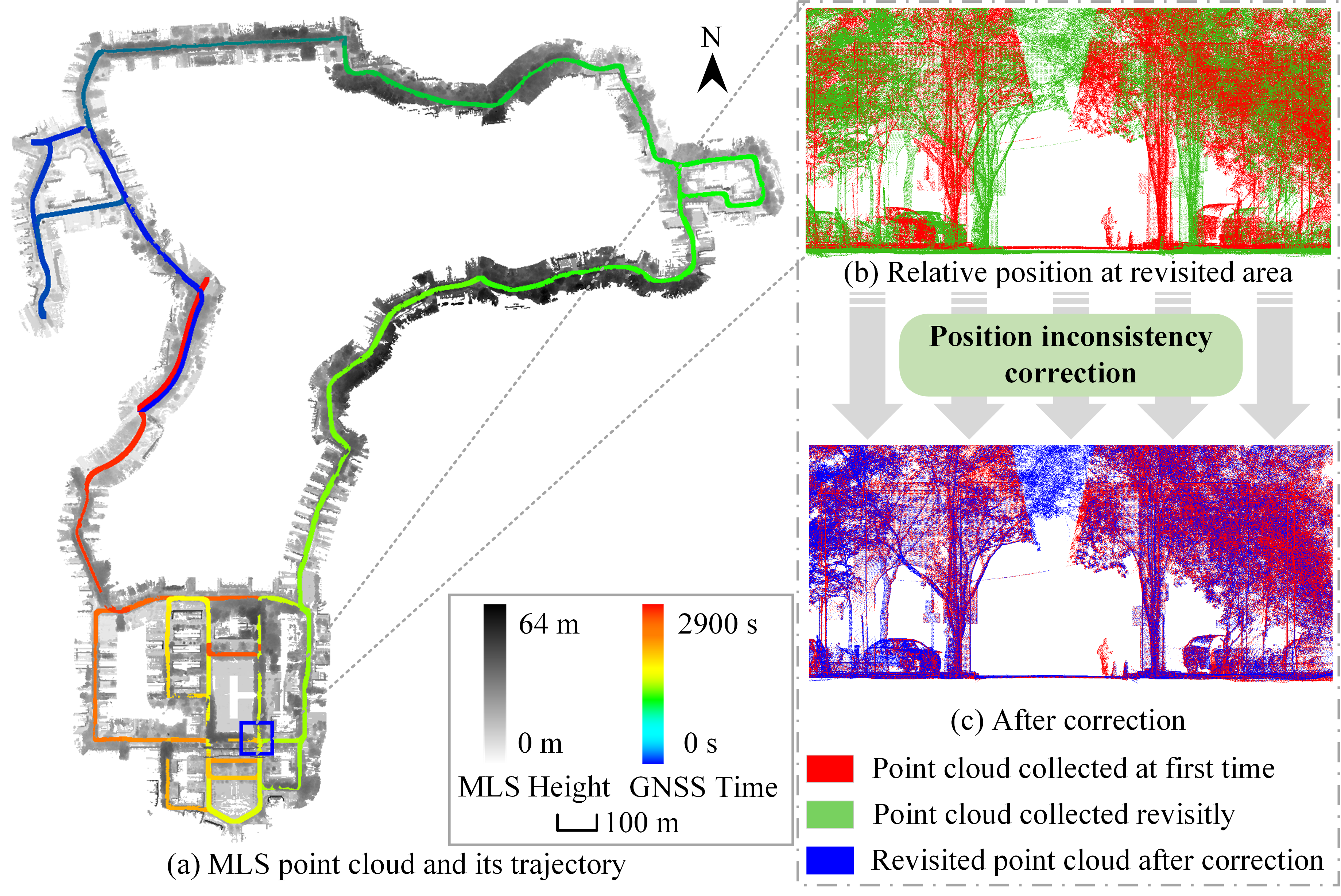
MuCoGraph: A Multi-scale Constraint Enhanced Pose Graph Framework for MLS Point Cloud Inconsistency Correction
Yuhao Li Zou, Xianghong Zou, Tian Li, Sihan Sun, Yuan Wang, Fuxun Liang, Jianping Li†, Bisheng Yang†, Zhen Dong
ISPRS Journal of Photogrammetry and Remote Sensing (IF: 12.7) 2023
We present MuCoGraph, which introduces multi-scale constraints to establish the correct correspondences for revisited areas, and formulates an enhanced pose graph for position inconsistency correction. The proposed method was used to correct the MLS point cloud position inconsistency in three datasets. The average three-dimensional distance of the checkpoints was reduced from 0.362 m, 0.108 m, and 1.027 m to 0.057 m, 0.033 m, and 0.051 m for datasets I, II, and III respectively. In addition, the root-mean-square error of all three datasets was less than 0.04 m after correction. The experiments confirmed that the proposed method can automatically locate and correct the position inconsistency of MLS point clouds, showing good robustness and effectiveness.
All publications
Selected Projects (view all )
Point cloud and image 3D bounding box labeling tool for autonomous driving
Xianghong Zou.
2018.06 - 2018.08
I developed a 3D bounding box labeling tool based on point clouds and images, serving for the research and development of object detection algorithms for autonomous driving.
Large scale point clouds and panorama images visualization based on WebGL
Xianghong Zou.
2016.06 - 2017.02
I developed a large scale point clouds and panorama images visualization based on WebGL. The system was built on Potree with ThreeJS, and it supports overlay display of point clouds and images, linkage with OSM map, and simple meansurement.
Electric Grid Unmanned Crowd Intelligence Inspection System Report Software
Guided by Prof. Bisheng Yang, Prof. Zhen Dong and Prof. Chi Chen from Wuhan University.
2021.02 - 2021.08
As a core developer, I was mainly responsible for software solution designing and implementing functions such as visualization of crossover detection results. The software has been scaled up in more than ten provinces and cities in China, generating significant social and economic benefits.
Point cloud data intelligent processing software: Point2Model
Guided by Prof. Bisheng Yang and Prof. Zhen Dong from Wuhan University.
2020.09 - 2021.12
As a core developer, I was mainly responsible for software solution design and framework construction. This software has been used for new basic surveying and mapping in multiple cities.